Rcss3d Nao
Rcss3d Nao is a ROS2 package that provides an interface to the RoboCup 3D Simulator SimSpark that closely matches a Aldebaran Nao robot interface.
The package aims to provide an interface that closely matches that of the the physical Aldebaran NAO so it can be used in the RoboCup Standard Platform League.
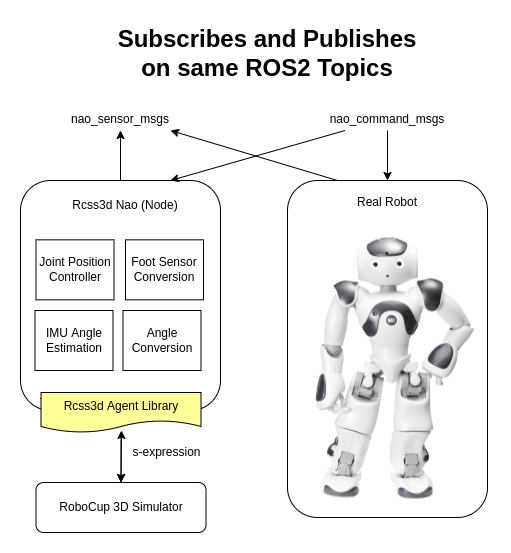
Publishing / Subscription is performed using interfaces specific to the Nao (nao_command_msgs and nao_sensor_msgs), such that this simulated Nao robot can be substituted out for a real robot seamlessly.
The project is hosted on Github by ROS Sports.